Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic Sensor
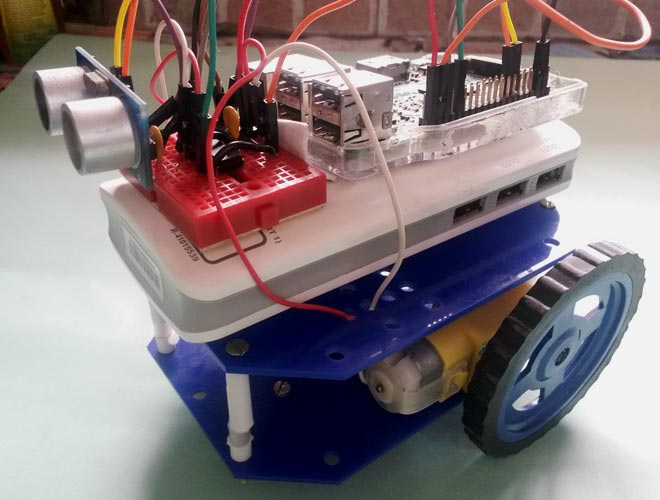
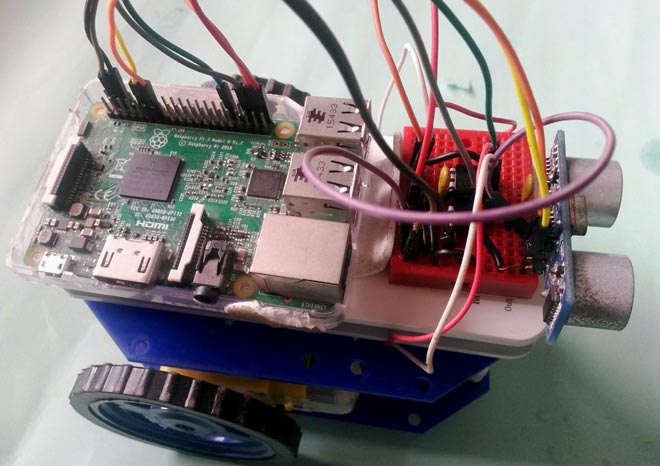
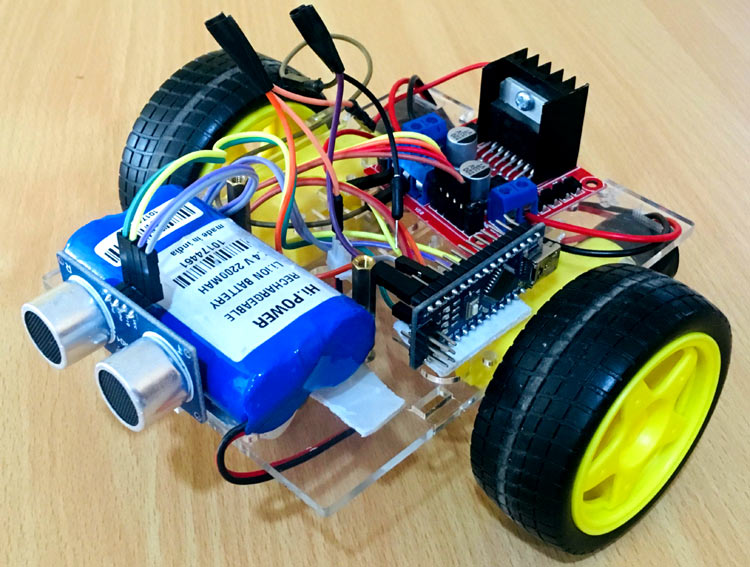
In our robot we have used the us sensor as the front sensor and two ir sensor for the left and right respectively. A motor driver ic l293d is connected to raspberry pi 3 for driving robots motors.
 Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
raspberry pi based obstacle avoiding robot using ultrasonic sensor is important information accompanied by photo and HD pictures sourced from all websites in the world. Download this image for free in High-Definition resolution the choice "download button" below. If you do not find the exact resolution you are looking for, then go for a native or higher resolution.
Don't forget to bookmark raspberry pi based obstacle avoiding robot using ultrasonic sensor using Ctrl + D (PC) or Command + D (macos). If you are using mobile phone, you could also use menu drawer from browser. Whether it's Windows, Mac, iOs or Android, you will be able to download the images using download button.
A motor driver ic l293d is connected to raspberry pi 3 for driving robots motors.

Raspberry pi based obstacle avoiding robot using ultrasonic sensor. In the previous article i have discussed the interface of ultrasonic sensor and the raspberry pi using the python language. This course will teach you how to make your own obstacle avoiding robot and start making amazing application such as fire fighting and remote control this guide will take you in a step by step manner to know what each component inside this circuit is and what it does and how to wire it up starting with the ultrasonic sensor ir sensor motor driver and ending with resistors. An ultrasonic sensor module used for detecting objects is connected at gpio pin 17 and 27 of raspberry pi.
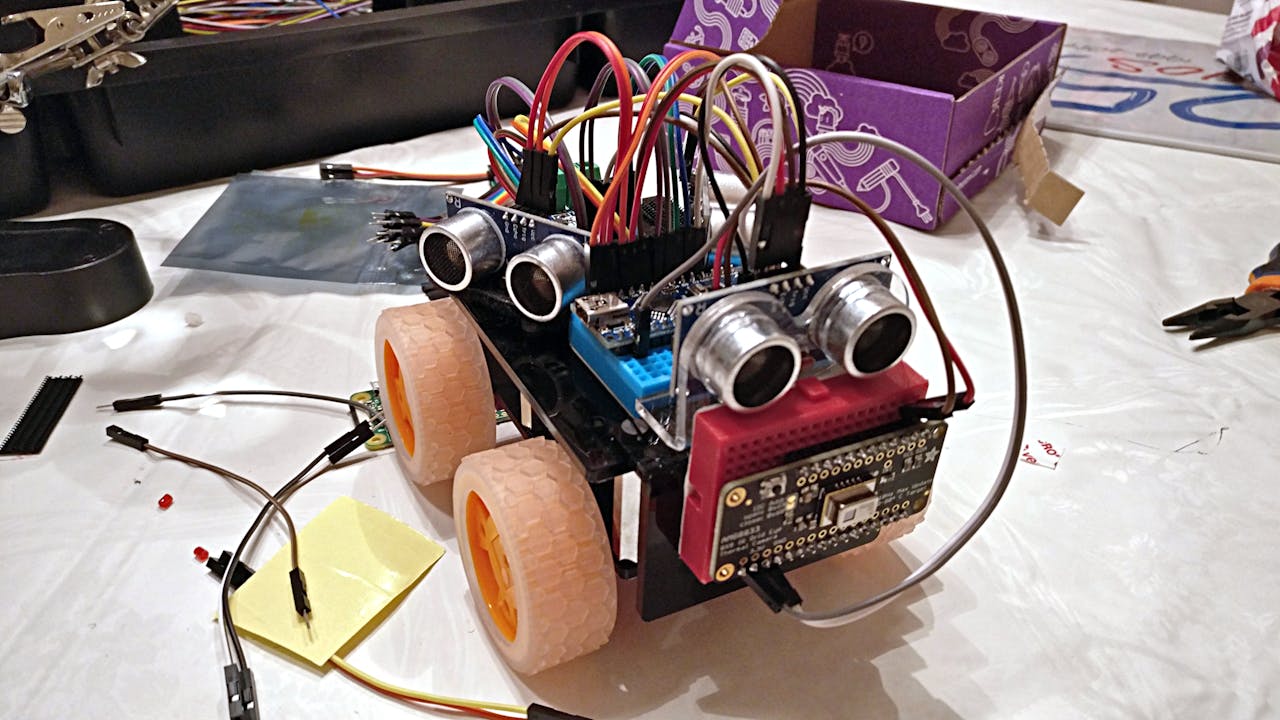
Use raspberry pi to create obstacle avoiding robot chassis raspberry pi is quite suitable for robot creation. Raspberry pi based wall avoiding robot. Attached is a python script which is again run as per previous instructions that will make a distance measurement using the ultrasonic sensor every 05 of a second.
Arduino is the main processing unit of the robot. The raspberry pi is a platform consisting of all necessary hardware module assembled on it. In this article i will discuss the raspberry pi based obstacle avoiding robot with ultrasonic sensor and python language.
The camera module gets the input image which are obtained are real time operation. A perfect example of the kinds of hardware projects you can make with the raspberry pi. Out of the 14 available digital io pins 7 pins are used in this project design.
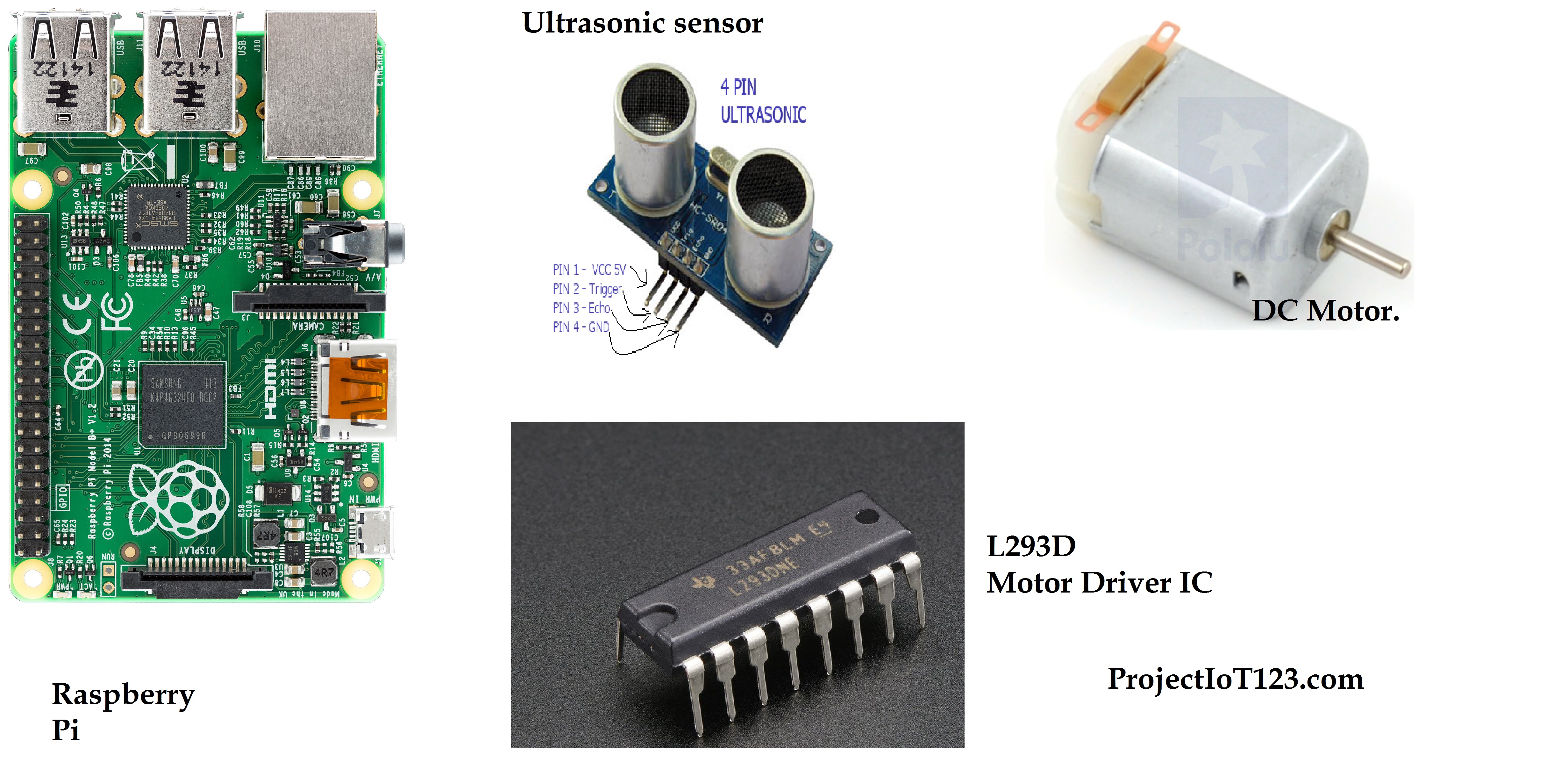
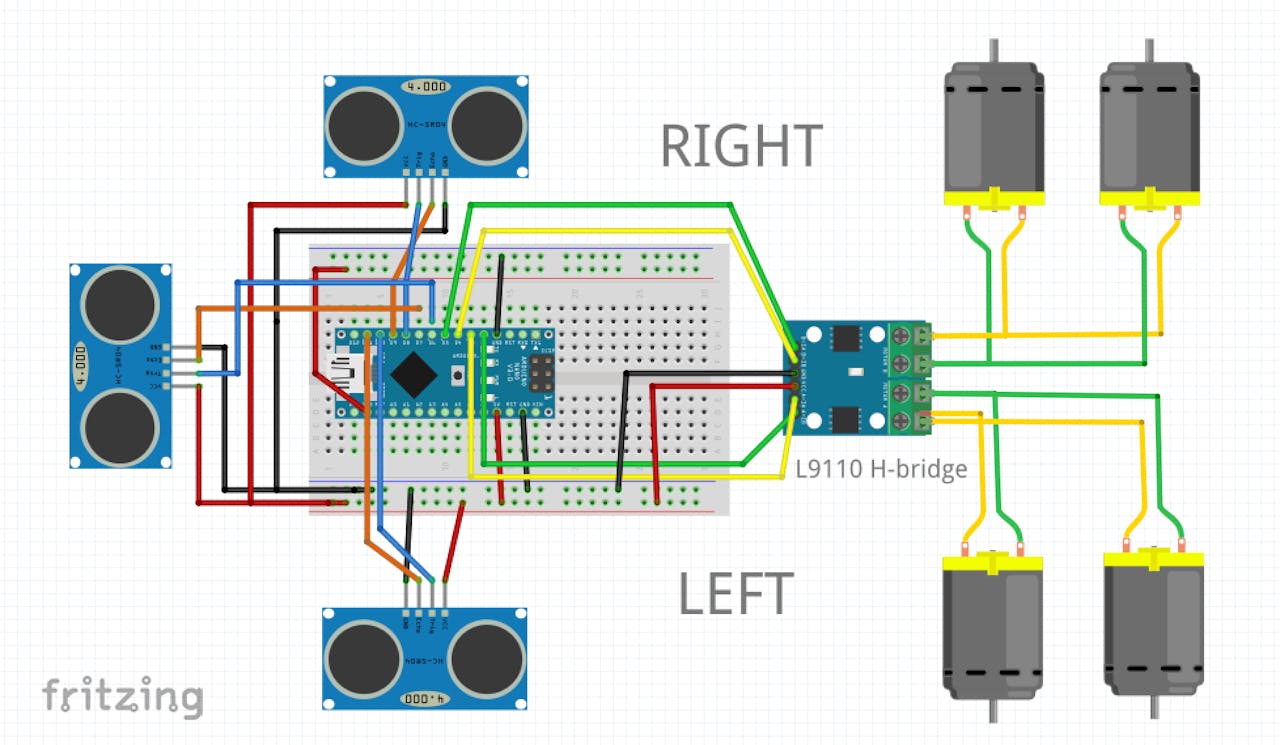
Vcc trig echo and gnd. Its gpio pins could be used to control the motors and sensors and itself could work as a server and get controlled via internet. Circuit is very simple for this obstacle avoiding robot using raspberry pi.
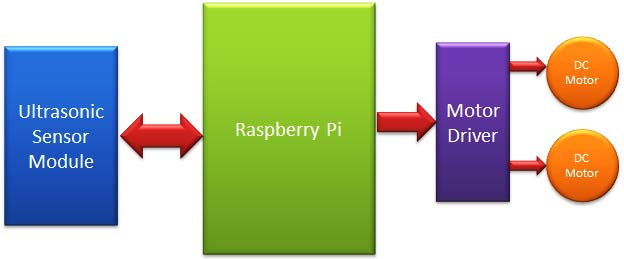
To detect an object we can use any use sensors like ir sensor and ultrasonic sensor. Raspberry pi based obstacle avoiding robot. The raspberry pi based obstacle avoiding robot consist of three main module ie.
Vcc and gnd are connected to the 5v and gnd pins of the arduino. Design of obstacle avoiding robot using arduino. Obstacle avoiding robot using pic microcontroller embedded.
For more information as well as all the latest diy hacking projects and articles visit the official website at httpsmakerpro. Circuit is very simple for this obstacle avoiding robot using raspberry pi. Camera module raspberry pi motor drivers.
An ultrasonic sensor module used for detecting objects is connected at gpio pin 17 and 27 of raspberry pi. The ultrasonic sensor has 4 pins. If this measurement falls below 10cm one of the wheels reverses.
 Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
 Raspberry Pi Based Obstacle Avoiding Robot With Ultrasonic
Raspberry Pi Based Obstacle Avoiding Robot With Ultrasonic
 Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
 Raspberry Pi Ultrasonic Sensor Example Gopigo
Raspberry Pi Ultrasonic Sensor Example Gopigo
 Arduino Based Obstacle Avoiding Robot Project With Code And
Arduino Based Obstacle Avoiding Robot Project With Code And
 Arduino Obstacle Avoidance Robot With Ultrasonic Hc Sr04
Arduino Obstacle Avoidance Robot With Ultrasonic Hc Sr04
How To Make An Obstacle Avoiding Robot With Raspberry Pi

 Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
Raspberry Pi Based Obstacle Avoiding Robot Using Ultrasonic
 Arduino Obstacle Avoidance Robot With Ultrasonic Hc Sr04
Arduino Obstacle Avoidance Robot With Ultrasonic Hc Sr04
 Circuit Diagram For Obstacle Avoiding Robot Using Arduino
Circuit Diagram For Obstacle Avoiding Robot Using Arduino